bene einstein,
i pezzettini hw tipici, come tu li hai chiamati, che sono necessari per realizzare l'oggetto in oggetto

potrebbero essere questi:
- pid_loop.gif (12.18 KiB) Viewed 3702 times
in particolare gli oggetti da descrivere in VHDL:
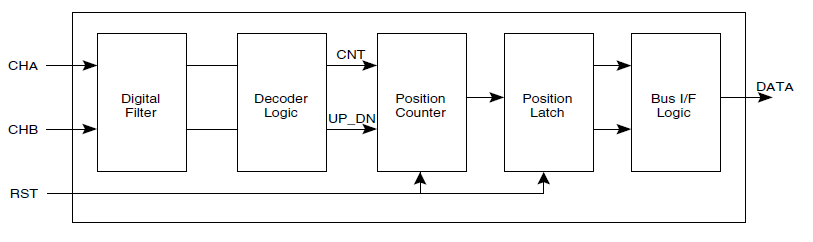
- encoder_circuit.png (12.75 KiB) Viewed 3702 times
questa è la parte più semplice a cui devi aggiungere i loop di regolazione PID, il generatore di profilo di velocità oltre chiaramente all'hw necessario per pilotare i motori, i cosiddetti DRIVER di potenza DC o BLDC.
Tutto ciò potrebbe essere fattibile con un atmega328.... ma il prb è la lettura di encoder incrementali ad alta risoluzione per giro e potresti al massimo gestire un singolo asse ... quindi è praticamente impossibile realizzare tutto ciò con arduino. Alcuni micro della famiglia AVR-Xmega, Cortex-m3/4 o i dsPic sono provvisti di modulo QEI che potrebbe aiutarti nella realizzazione di un motion controller embedded.