

 |
Copyright © 2007-2015 Giovanni De Luca
Giovanni De Luca web page
Giovanni De Luca web page
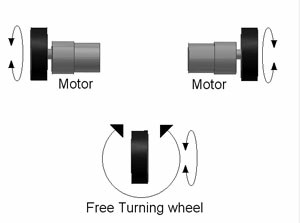
Un robot a 2 ruote differenziali è un robot mobile il cui movimento è basato su due ruote motorizzate separatamente poste ai lati del corpo del robot. Si può quindi cambiare la sua direzione variando il tasso relativo di rotazione delle ruote e quindi non richiede un ulteriore movimento dello sterzo.
Se entrambe le ruote sono azionate nella stessa direzione e medesima velocità, il robot va in linea retta. In caso contrario, a seconda della velocità di rotazione e della sua direzione, il centro di rotazione può cadere in qualsiasi punto della linea che congiunge le due ruote. Dal momento che la direzione del robot dipende dalla velocità e dalla direzione di rotazione delle due ruote motrici, tali quantitativi devono essere percepiti e controllati con precisione. Per questo motivo ai motori che trasmettono il moto alle ruote sono accoppiati encoder incrementali per la rilevazione della posizione e della velocità che poi viene elaborata da controllori dedicati.
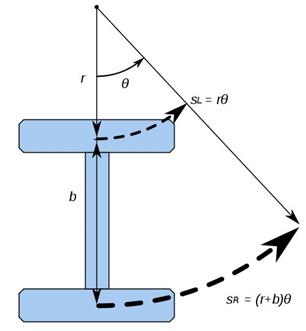
Se entrambe le ruote sono azionate con velocità uguale in direzioni opposte, come è evidente dal diagramma mostrato, il robot ruoterà attorno al punto centrale dell'asse.
Un robot guidato in modo differenziale è simile al differenziale utilizzato nelle automobili, in quanto entrambe le ruote possono avere diversi tassi di rotazioni, ma a differenza del sistema di ingranaggio differenziale, un sistema differenziale sterzante avrà entrambe le ruote motrici. Le ruote differenziali sono ampiamente utilizzate nella robotica, dal momento che il loro moto è facile da programmare e può essere ben controllato.












Istituto Nazionale di Fisica Nucleare - LNS
Laboratorio Progettazione Elettronica
Istituto Nazionale di Fisica Nucleare - LNS
Laboratorio Progettazione Elettronica
DUAL DRIVE ROBOT